Nanosistemas Operating SystemEnglish | Português The Nanosistemas operating system was a personal project, with the goal of writting an operating system entirely in 80386 Assembly language, taking advantage of the enormous size and speed efficiency of Assembly over higher-level languages. It seemed a good idea, and so development started in mid-1997 (at age 17) with the first working version ready by the end of 1998. The project later evolved into the NSIS PAD; an embedded version for electronic projects that need a graphical user interface. Follows some video and screen shots of Nanosistemas. Back to main page Train Weighting Station SoftwareThis is a demonstration of the Nanosistemas OS running an industrial application. If this video is not playing on your browser, click here to download it. About this video
This video shows Nanosistemas running a train weighting station control software developed for CVRD (Companhia Vale do Rio Doce); the largest producer of iron ore and nickel in the world, today simply called Vale. This software greatly increased the speed of weighting trains by providing the operators with a more efficient way of processing the wagons. It was designed by myself in 1999 during a technical college internship there after observing the repetitive work the operators did to process each wagon. With this software, the weighting station would be done by 2PM every day, where it would normally go past 6PM with the previous software, costing the company a lot in overtimes and delays. About a month after this software was put in operation, I was called to the management of the seaport to present the project, and this software was then adopted as the permanent solution for the terminal, receiving improvements and minor adjustments until the end of the internship. Seaport Crane JoystickThis demonstrates the seaport crane joystick configuration software. If this video is not playing on your browser, click here to download it. About this video
This video shows Nanosistemas running the configuration software for the seaport crane joystick controller. During the internship at CVRD, it came to my attention how often the joystick controllers of the seaport cranes needed maintenance. After looking into one, the problem became clear: they used potentiometers to provide a voltage reference for the X and Y-axis. Operating near the ocean and unloading mostly coal, those potentiometers would have a short life spam due to sea moisture and coal dust. I then proposed to Jaguar, the company that manufactured those joysticks, an alternative where two coils would be used instead of the potentiometers, and as the X and Y-axis turned a metal rod would be inserted and removed into each of the coils, changing their impedance. An electronic circuit would then read the impedance of the coils and output the corresponding voltages to the seaport crane. They liked the idea, so they manufactured the mechanical part for this new joystick controller while I designed the electronics. And after putting both together, it worked. The new controller would output the correct voltages with great resistance against sea moisture and coal dust. Animated Background DemonstrationThe following video demonstrates the animated background feature provided by Nanosistemas. If this video is not playing on your browser, click here to download it. About this video
This video first shows the user configuring the animated background feature provided by Nanosistemas. This feature consumed nearly no CPU time, and could be run in parallel with any application without compromising performance. Video compression, however, lowered the quality of the moving bars in this video. Nanosistemas Screen ShotsMiscellaneous screen shots of Nanosistemas.     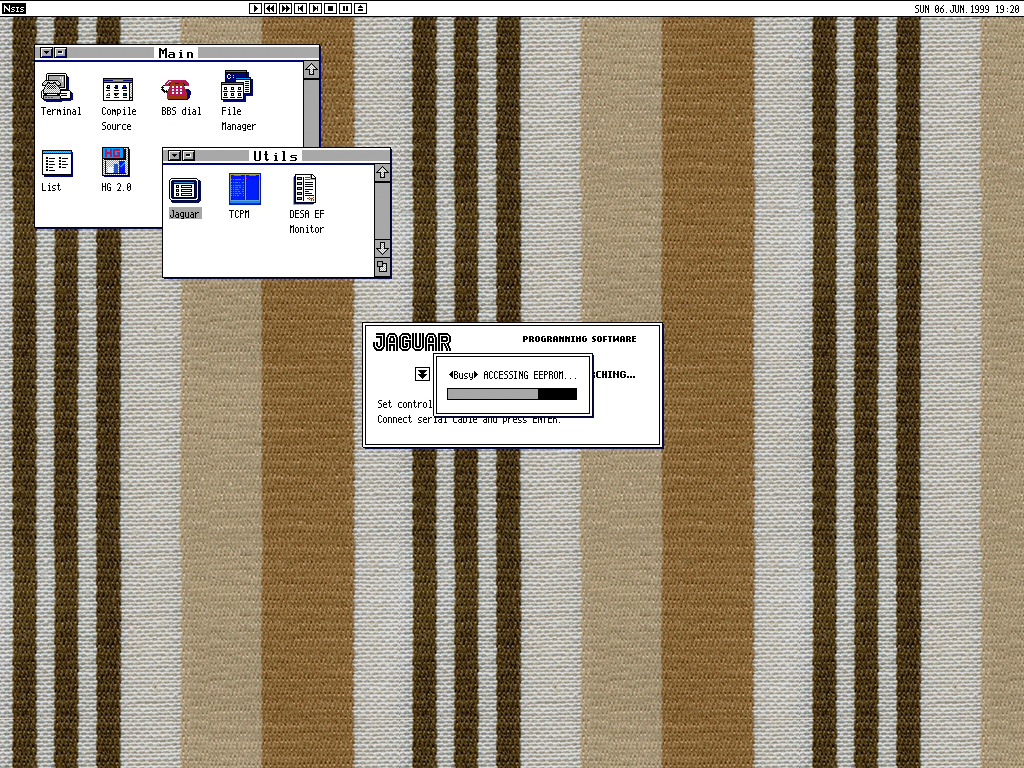 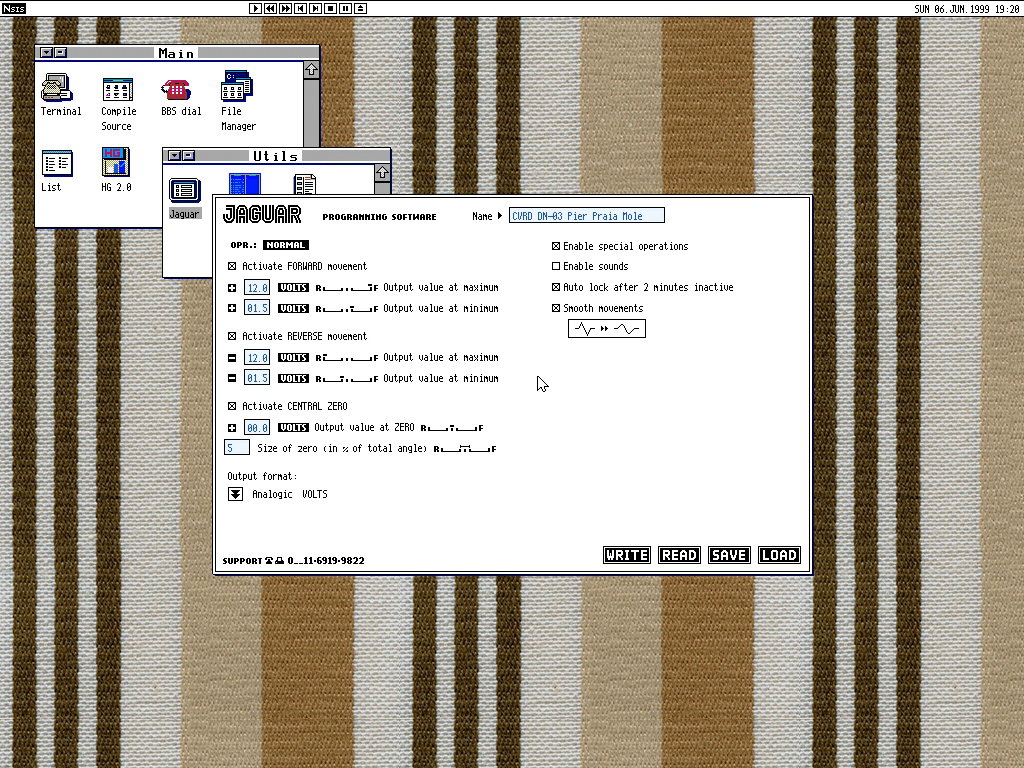 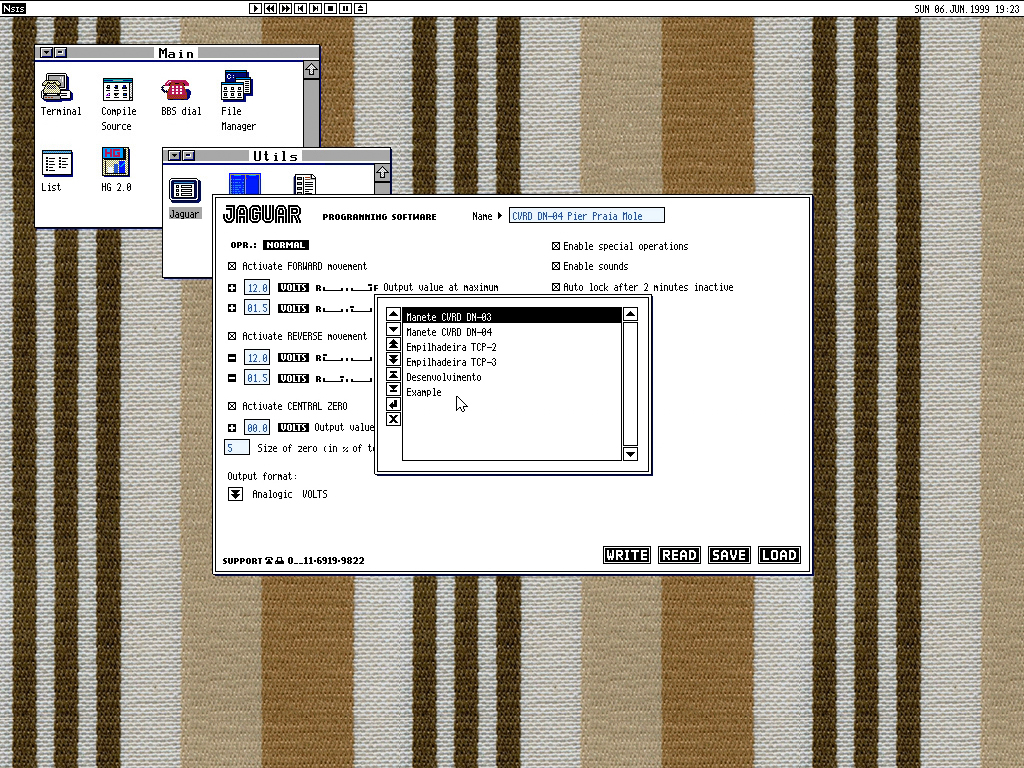 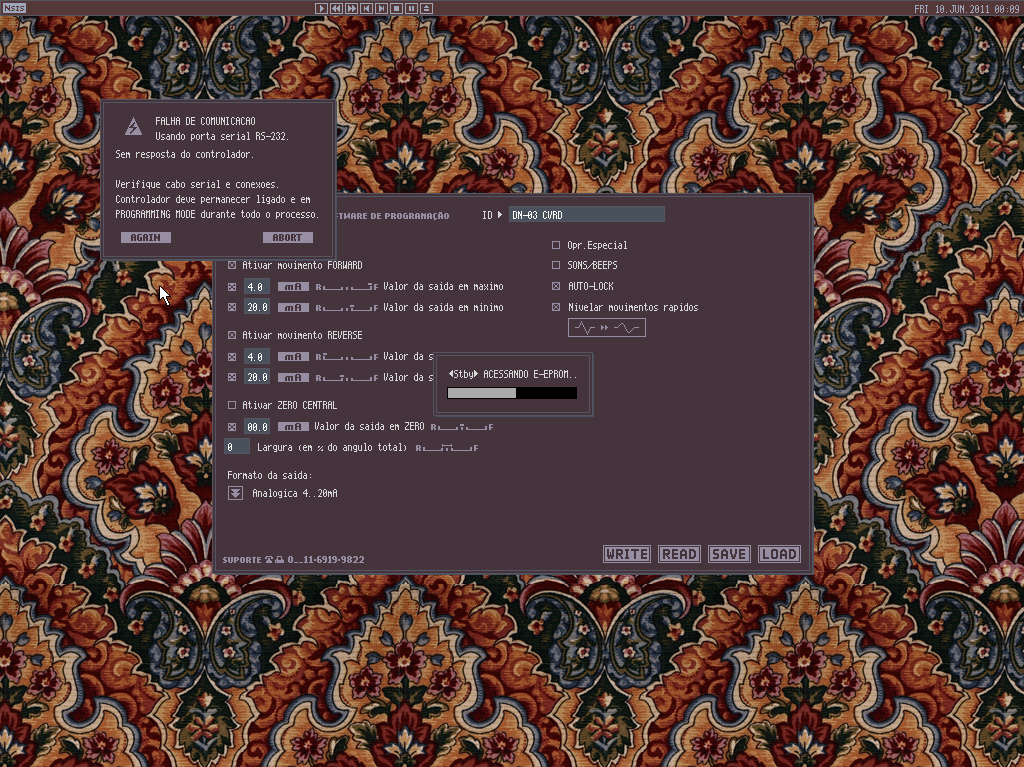 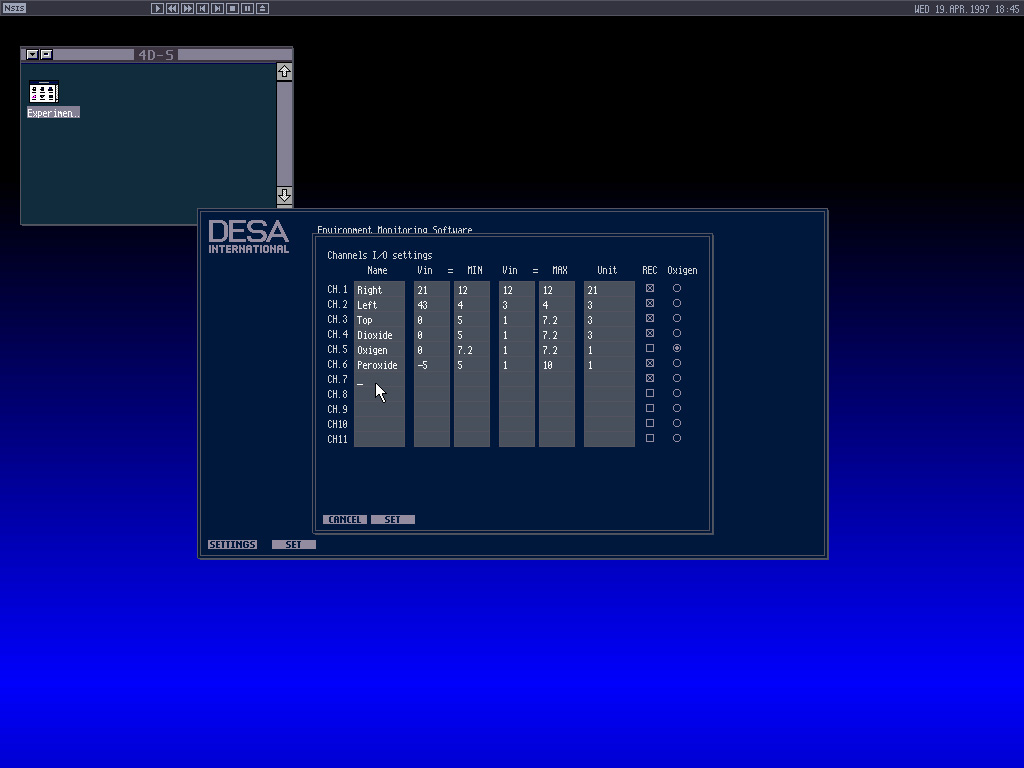 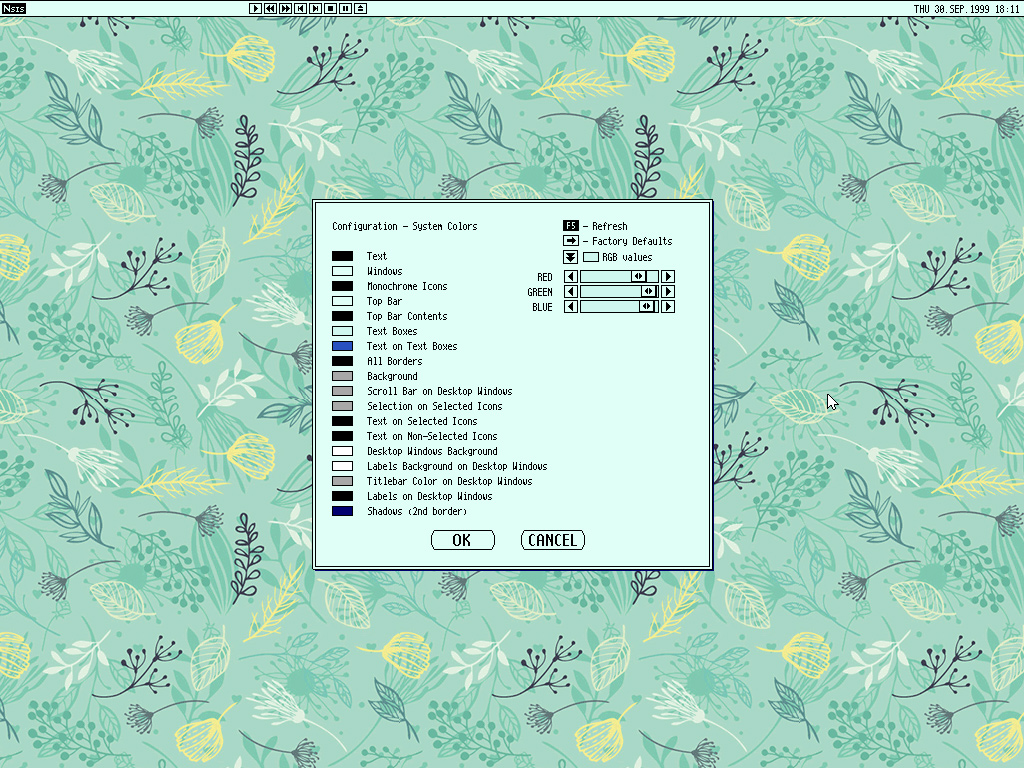  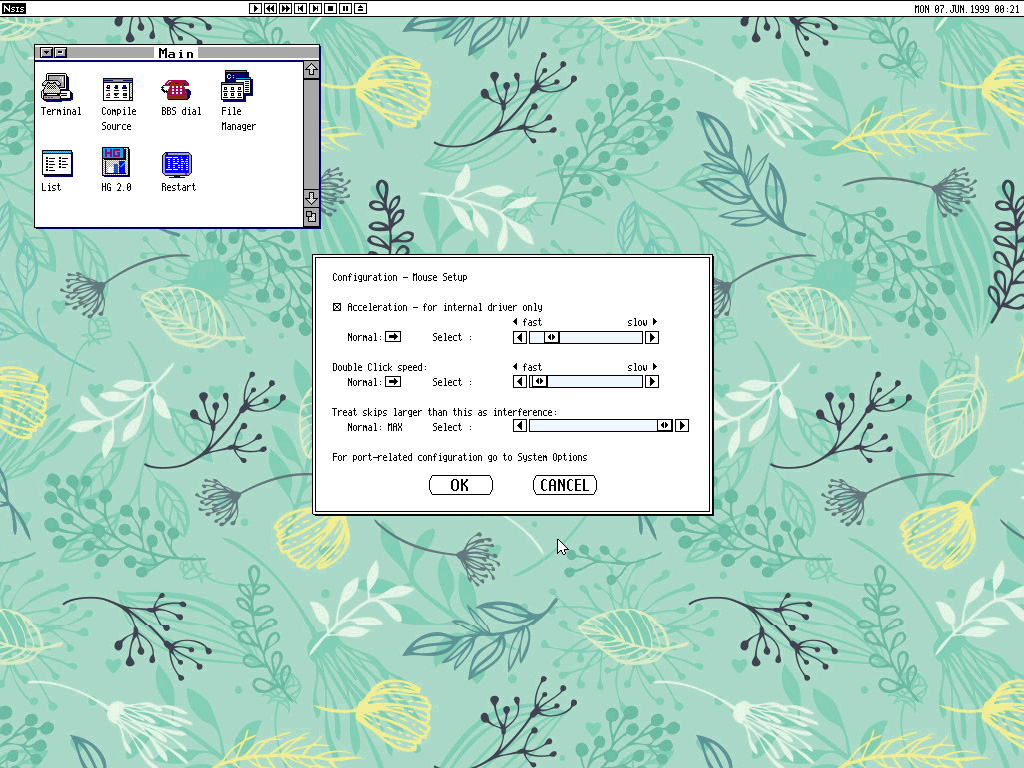 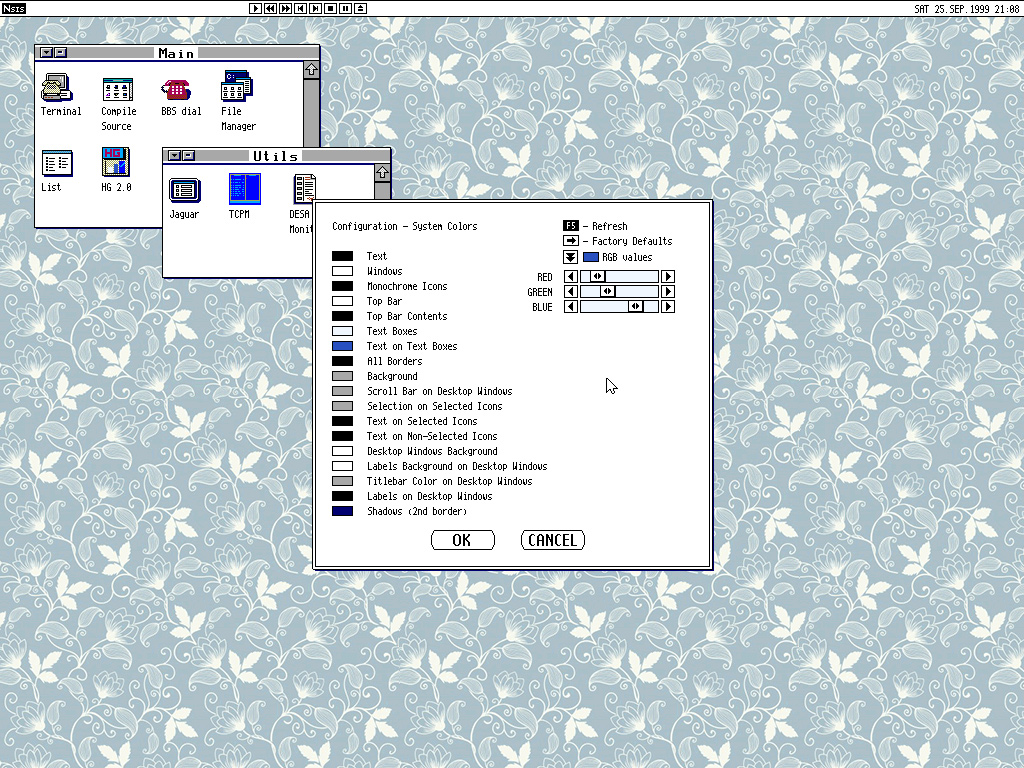     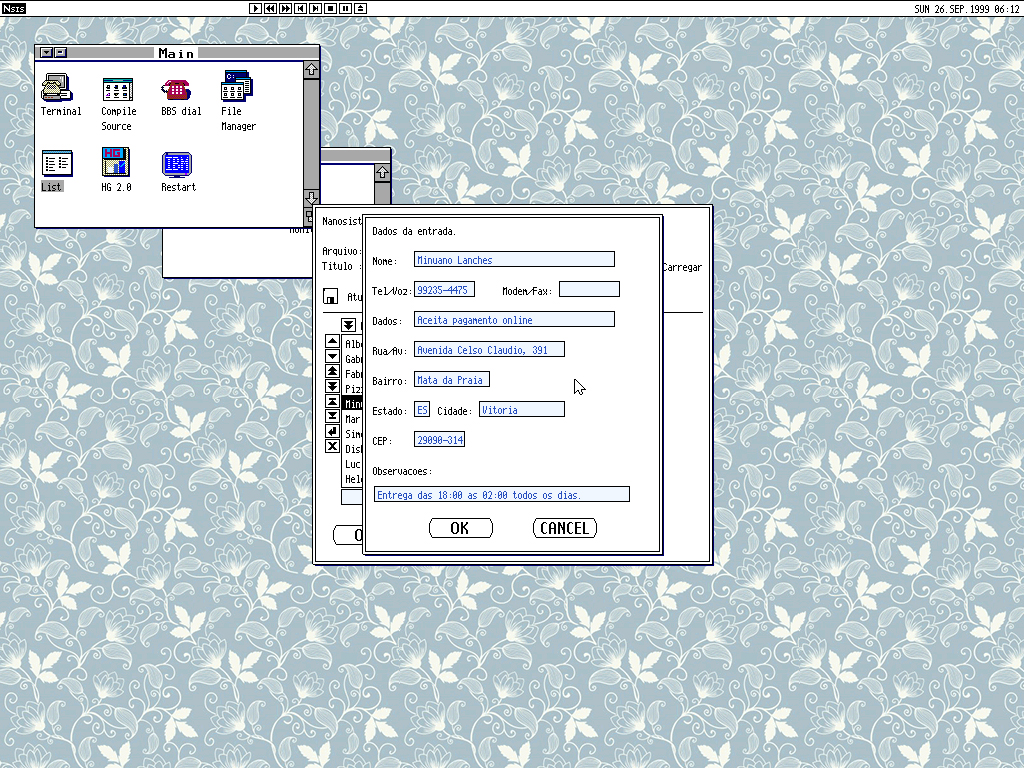 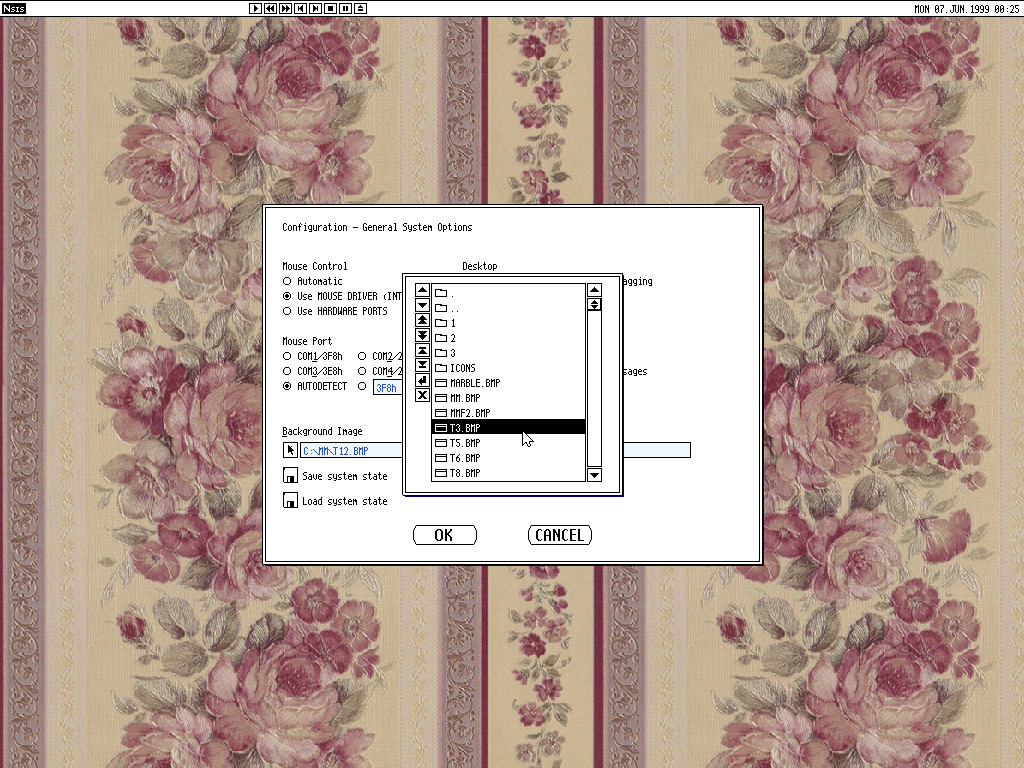 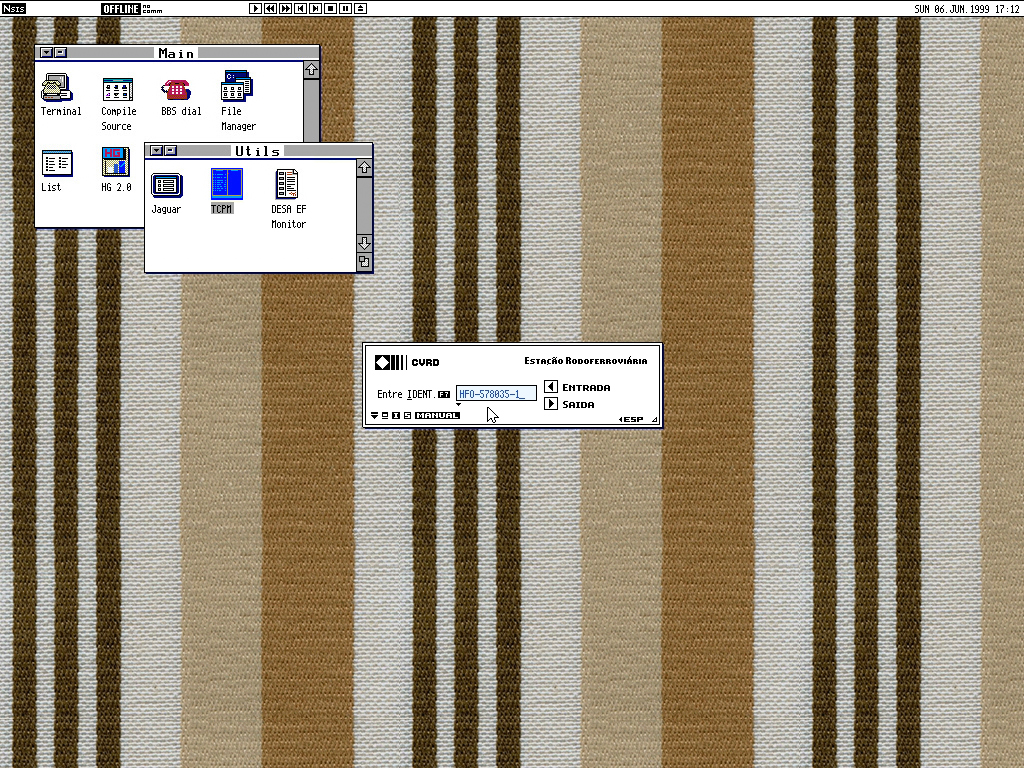 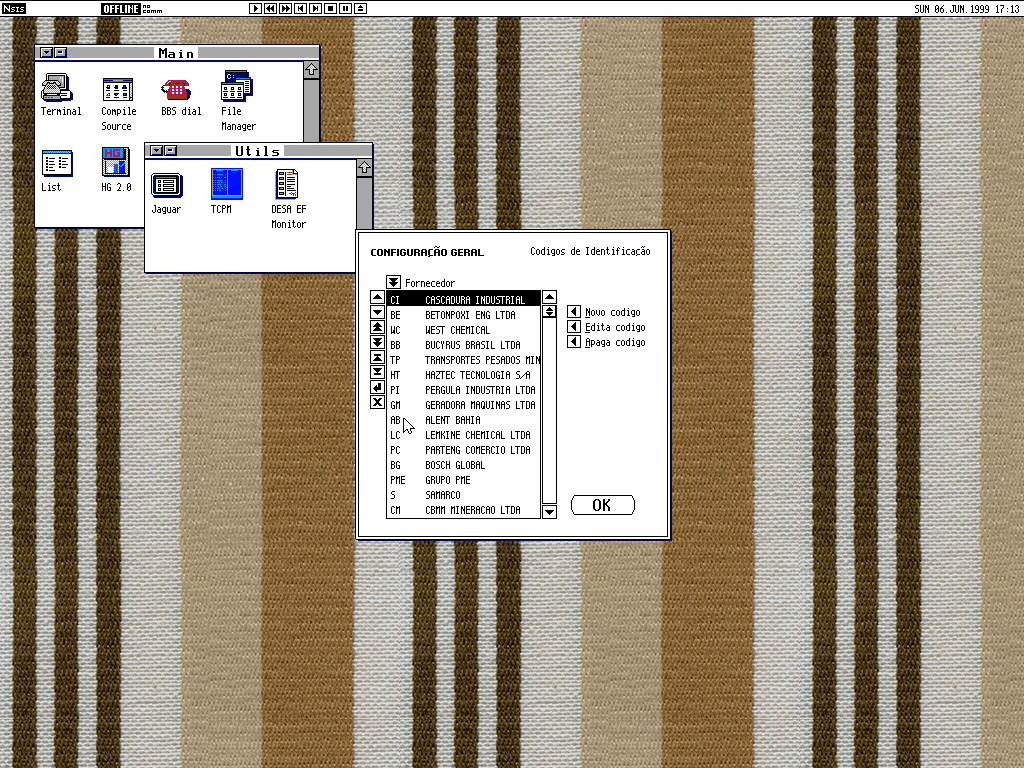    |